


Bevezetés a PEEK anyagbaRobotérzékelők
A PEEK (poliéter-éter-keton) egy nagy teljesítményű, speciális műszaki műanyag, amely olyan tulajdonságokkal rendelkezik, mint a magas hőmérséklet-állóság (hosszú távú üzemi hőmérséklet körülbelül 240 °C), kémiai korrózióállóság, nagy szilárdság, könnyű súly, alacsony súrlódási együttható és kiváló elektromos szigetelés. Ezek az előnyök ideális anyaggá teszik a robotérzékelők kulcsfontosságú alkatrészeihez, kiküszöbölve a hagyományos fém vagy műanyag érzékelők hiányosságait a pontosság, a stabilitás és a környezeti alkalmazkodóképesség tekintetében.
I. Alapvető alkalmazástípusok és jellemzők
A PEEK anyag főként az érzékelők alapvető szerkezeti elemeinek vagy funkcionális szubsztrátjainak gyártásával működik. A gyakori alkalmazási típusok a következők:
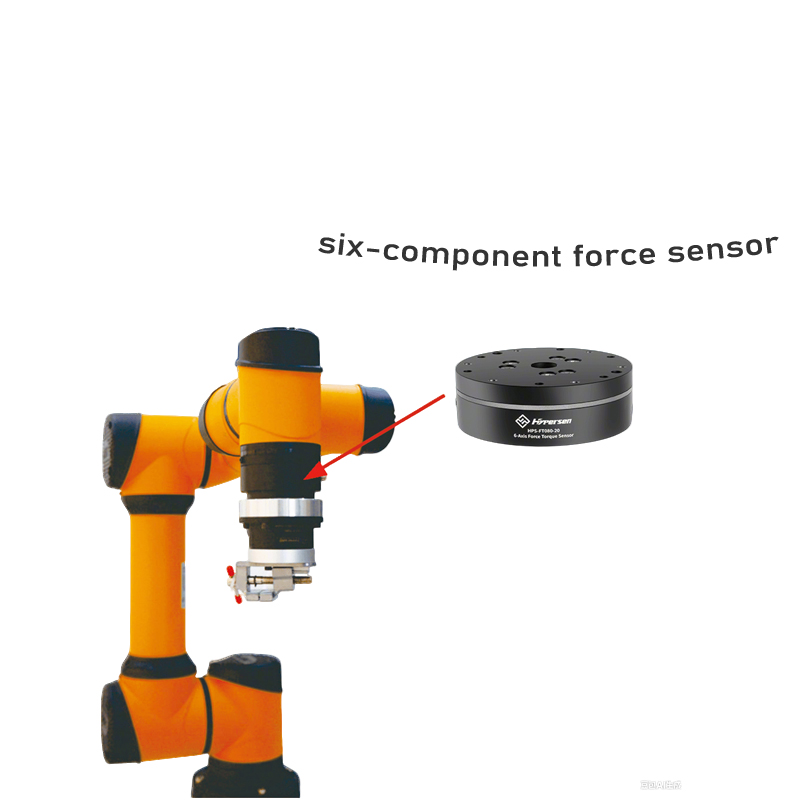
1. Hatdimenziós erő-/nyomatékérzékelők
Alkalmazási rész: Az érzékelő " rugalmas teste" (az erőjel érzékeléséért felelős központi elem).
Alapvető érték: A hagyományos rugalmas testek többnyire alumíniumötvözetből készülnek, míg a PEEK jobb rugalmassági modulus-sűrűség aránnyal rendelkezik - biztosítva a szerkezeti szilárdságot, miközben jelentősen csökkenti a rugalmas test tömegét, minimalizálja a tehetetlenségi interferenciát a robot mozgása során, és javítja az erőmérési pontosságot (akár ±0,1% FS) és a dinamikus válaszidőt (válaszidő < 1 ms).
Tipikus forgatókönyvek: Ipari robotok összeszerelése (például precíz csavarhúzóerő-szabályozás), együttműködő robotok ember-gép interakciója (például ütközési erő érzékelése), orvosi robotok sebészeti erő-visszacsatolása (például csontfelszíni csiszolási erő monitorozása ortopédiai robotokban).

2. Tapintás-/feszültségérzékelők
Alkalmazási rész: Az érzékelő rugalmas hordozója vagy elektródahordozója.
Alapvető érték: A PEEK bizonyos rugalmassággal és kifáradási ellenállással rendelkezik, lehetővé téve vékony vagy szabálytalan formákká való feldolgozását, alkalmassá téve ívelt vagy rugalmas érintkezési helyzetekhez, például robotujjakhoz és megfogókhoz; ugyanakkor elektromos szigetelése megakadályozza a jelinterferenciát, biztosítva a tapintási (például nyomás, textúrafelismerés) vagy feszültség (például ízületi deformáció) adatok stabilitását.
Tipikus forgatókönyvek: Nyomásérzékelés szolgáltató robotoknál törékeny tárgyak (például üveg, gyümölcsök) megragadásakor, feszültségfigyelés az ipari robot rugalmas szerelvényébe való illeszkedéshez.
3. Speciális érzékelők korrozív környezetekhez
Alkalmazási rész: Az érzékelő háza, szondavédő hüvelye vagy érintkező alkatrészei.
Alapvető érték: A PEEK rendkívül erősen ellenáll a savaknak, lúgoknak, szerves oldószereknek és a magas hőmérsékletű gőznek (például az élelmiszeriparban a CIP-tisztításnak), messze felülmúlja a rozsdamentes acélt vagy a hagyományos műanyagokat, védi az érzékelő belső alkatrészeit a korróziótól és meghosszabbítja annak élettartamát.
Tipikus forgatókönyvek: Folyadékszint-/koncentrációérzékelők élelmiszeripari/orvosi robotokban (például a folyadékszint monitorozása szósztartályokban), környezeti paraméter-érzékelők vegyipari robotokban (például korrozív gázérzékelő szondák védelme).
II. Alapvető előnyök a hagyományos anyagokkal szemben

III. Tipikus alkalmazási területek
Ipari robotok: Szerelési erő szabályozása, csiszolási erő visszacsatolás, megfogási nyomás monitorozása;
Orvosi robotok: Sebészeti eszközök erőérzékelése (például erő-visszacsatolás laparoszkópos műtéteknél), rehabilitációs robotok ízületi terhelésének monitorozása;
Speciális robotok: Korrózióálló környezetérzékelők élelmiszeripari/vegyipari területeken, hőmérséklet-/erőérzékelők magas hőmérsékleti körülmények között (például autóipari hegesztés).











